
Chyba formátu e-mailu
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


Specifická nárůst servo
2024-04-29 16:44:08
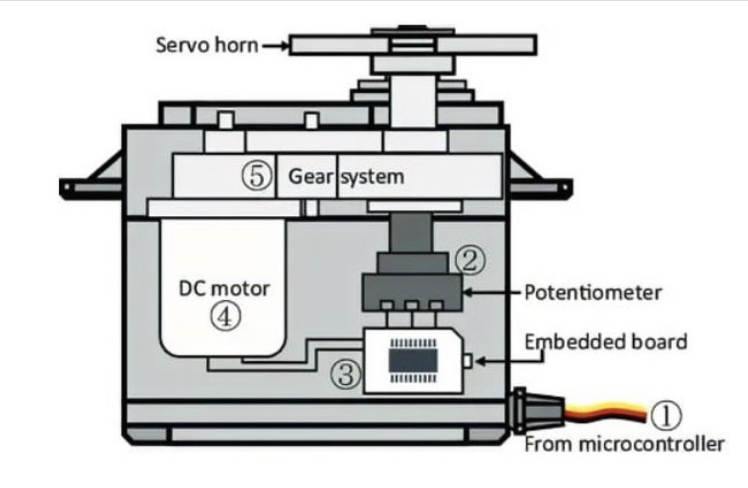
Specifická struktura servo je následující:
①: Signal Line: Přijměte řídicí signál z mikrokontroléru;
②: potenciometr: Může měřit polohu výstupního hřídele, která patří do
zpětná vazba celého servovaru;
③: Interní ovladač: Zpracování signálu z externího ovládání, řízení motoru a
Zpracování signálu polohy zpětné vazby, je jádrem celého servovaru;
④: Motor: Jako ovladač, kolik rychlosti, točivého momentu, polohy je výstup;
⑤: přenosový mechanismus/servo systém: Tento mechanismus upravuje výstupní zdvih
motor k konečnému výstupnímu úhlu podle určitého přenosového poměru;
Výstup servo je řízen odesláním signálu PWM na signální linii servo.
①: Signal Line: Přijměte řídicí signál z mikrokontroléru;
②: potenciometr: Může měřit polohu výstupního hřídele, která patří do
zpětná vazba celého servovaru;
③: Interní ovladač: Zpracování signálu z externího ovládání, řízení motoru a
Zpracování signálu polohy zpětné vazby, je jádrem celého servovaru;
④: Motor: Jako ovladač, kolik rychlosti, točivého momentu, polohy je výstup;
⑤: přenosový mechanismus/servo systém: Tento mechanismus upravuje výstupní zdvih
motor k konečnému výstupnímu úhlu podle určitého přenosového poměru;
Výstup servo je řízen odesláním signálu PWM na signální linii servo.
Kontaktujte nás
ZNAČKY PRODUKTŮ
Kontaktujte nás
Váš dotaz uveďte ve formuláři níže. Odpovíme vám do 24 hodin.